

Deux systèmes de pointage manuel ont été réalisés pour ce télescope, le premier est simplement basé sur l'utilisation d'un logiciel de conversion de coordonnées équatoriales en azimutales puis déplacement manuel du télescope aux graduations correspondantes sur les cadrans, le deuxième consiste à réaliser une interface de type "cercles digitaux" reliée au PC avec pointage au travers d'un logiciel dédié, ou prise en charge par un logiciel de cartographie.
Cliquez sur les miniatures pour visualiser les images
|
|
Le logiciel utilisé pour ce premier système s'appelle ASTRO, c'est une application MS-Dos, tournant parfaitement sur un PC ancien et comportant beaucoup de fonctionnalités pour préparer une observation ou pour une utilisation sur le terrain. Plutôt que de le détailler ici, je vous invite à visiter le site qui lui est dédié, voir mes liens "POINTAGE". Ci-dessus deux copies d'écran avec à droite le menu de départ, ci-dessous une autre copie montrant l'affichage des coordonnées azimutales de l'objet choisi (ici M13).

Le Principe de fonctionnement est simple, après avoir renseigné le logiciel sur les paramètres du lieu d'observation (longitude et latitude), et s'être assuré de la validité de la date et de l'heure système, on accède après le choix du type d'objets et de la constellation souhaitée aux fichiers des données comprenant notamment les coordonnées équatoriales et leur conversion en coordonnées azimutales locales. Le calcul de conversion est automatiquement rafraîchi toutes les minutes.
Une mise en station (simplifiée) est tout de même nécessaire, elle consiste en un réglage d'horizontalité de la monture ou plus exactement du plan de rotation en azimut au moyen d'un niveau à bulle, et également en un réglage d'alignement du zéro degré du cadran gradué vers le sud grâce à une boussole juxtaposée. Le pointage d'un premier objet aux coordonnées permet de vérifier ces réglages, si l'objet n'est pas dans le champs, on le recherche aux alentours jusqu'à le centrer dans le champs, puis la lecture des graduations des 2 axes permet de faire la différence avec les coordonnées calculées par le logiciel. Si cette différence est minime, on peut la saisir dans les paramètres du logiciel qui la prendra en compte au prochain pointage et corrigera son calcul en fonction, sinon il faut affiner la mise en station.
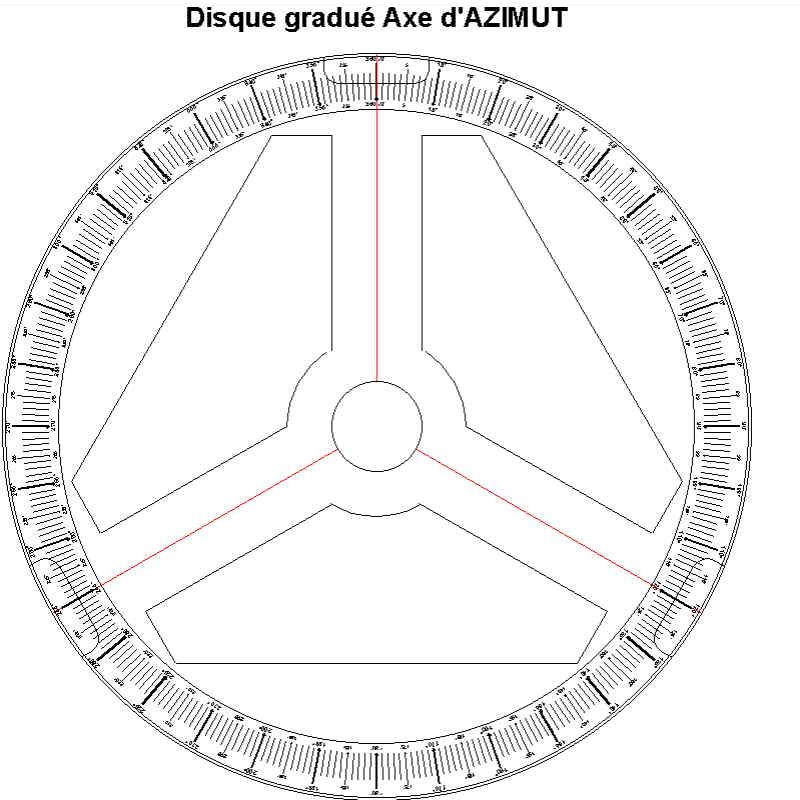
Il est évident que le plus grand soin est à apporter à la réalisation et au positionnement des cadrans gradués, là encore l'informatique vient au secours de l'amateur. Beaucoup de logiciels de dessin ont la possibilité de copier un trait et un texte de graduation en rotation selon un diamètre déterminé, il suffira ensuite de réaliser une sortie traceur à l'échelle 1, de la plastifier coté imprimé et de l'adhésiver au dos avec du double-face. Il faut prévoir également des repères de centrage sur le dessin pour assurer un positionnement précis. Ci-dessous les dessins réalisés pour ce télescope :
 |
 |
Le cercle gradué d'azimut mesure 50 cm de diamètre, sa facilité de lecture et sa précision sont excellente, le secteur gradué d'altitude mesure 18 cm de diamètre, c'est vraiment juste en utilisation.
Pour conclure avec ce système, j'ai fait le constat suivant sur le terrain : Avec une mise en station correcte et un grossissement de 40x, les objets recherchés sont bien dans le champs visuel, avec un grossissement de 80x, les objets sont plus fréquemment en bord de champs ou juste à coté. Par rapport à une recherche purement visuelle, l'efficacité du système est déjà flagrante.
Pour augmenter le confort et la précision dans le pointage d'un Dobson vers un objet céleste, il existe un autre système que l'on appelle les cercles digitaux (procurables dans le commerce, mais à des tarifs plutôt dissuasifs). De quoi s'agit-il ? C'est en fait un dispositif électronique, accouplé à deux encodeurs optiques mesurant les déplacements du télescope sur ses deux axes (altitude et azimut pour un Dobson) et indiquant donc à tout instant la position du télescope sur la voûte céleste, ou pouvant nous guider pour la recherche vers un objet spécifié. Comme pour les cadrans de pointage, c'est l'observateur qui déplace manuellement le télescope et engendre de ce fait le fonctionnement du système.
Le système présenté ici est donc constitué des éléments suivants, 2 encodeurs optiques servant de capteurs de déplacement des axes du télescope, 1 carte d'interface effectuant la lecture de l'information venant des encodeurs et la communicant au PC du télescope par l'intermédiaire du port série de ce dernier, enfin on aura soit un logiciel dédié à cette application sur le PC, soit la prise en compte de l'interface par un logiciel de planétarium, grâce à un protocole de communication reconnu qui permettra de suivre le déplacement du télescope sur la carte affichée à l'écran.
N'étant pas très qualifié pour la conception électronique, une recherche sur internet m'a permis de trouver un schéma, et donc une réalisation correspondant au projet souhaité. Vous trouverez donc dans Mes liens le site source de cette réalisation avec tous les détails techniques.
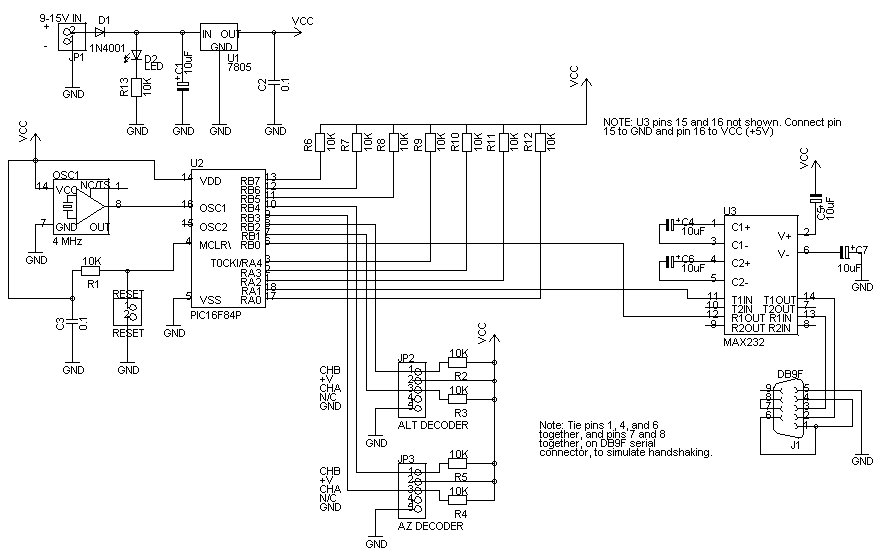
Schéma électrique |
 |

Schéma carte |
Le concept de cette carte est bâti sur l'utilisation de composants programmables, en l'occurrence ici un microcontrôleur PIC 16F84 dans lequel il faudra enregistrer le programme fourni par l'auteur avant de pouvoir utiliser ce montage. Vous trouverez également sur le site source tous les outils nécessaires pour réaliser un programmateur de microcontrôleur vraiment très simple afin de mener à bien cette tâche.
Après avoir réalisé la carte, il faut solutionner le problème des capteurs de mouvement, à savoir les codeurs optiques. Deux solutions sont possible, soit acheter ces composants chez certains revendeurs d'électronique mais au prix fort (150 euros/pièce mini), soit utiliser les codeurs contenus dans certaines souris de PC, comme l'ont fait certains amateurs de façon astucieuse. C'est évidemment la deuxième solution que j'ai choisi, voyons donc sur les photos à quoi cela ressemble.
 |
 |
 |
Une fois la souris ouverte, il est aisé de démonter les roues codeuses avec leur capots, laissant ensuite apparaître les diodes infra rouges émettrices et réceptrices (flèches rouges sur photo centrale). Après avoir récupéré ces composant il va falloir élaborer un petit circuit qui deviendra notre encodeur et dont je vous soumet les schémas et photos ci-après.

Schéma électrique |
 |

Schéma cartes |
Les codeurs optiques venant d'une souris, n'ont pas une définition très importante (ici 64 pas par tour), il sera donc nécessaire de prévoir une démultiplication jusqu'à atteindre 2000 à 4000 pas effectués pour un tour d'axe du télescope, afin d'augmenter la précision. De plus ces codeurs étant fragiles, ils ne devront pas être soumis à des contraintes mécaniques. Ces dernières remarques constitueront donc le cahier des charges à respecter pour réaliser le montage mécanique sur chaque axe du télescope.
La solution adoptée la plus simple possible est donc la suivante :
Pour l'axe d'altitude, le tourillon entraine par friction un galet revétu de cahoutchouc dur, galet qui entraine à son tour la roue codeuse par l'intermédiaire d'une courroie (élastique plat et pas trop "élastique").
Pour l'axe d'azimut ce même principe a été reproduit, les photo ci-dessous montrent les détails du montage. Le fait d'utiliser des galets cahoutchoutés et des élastiques, garanti un bonne adhérence pour un entrainement par friction, et je pense ne doit pas pénaliser le fonctionnement vu la faible masse et donc inertie du système. Je compte aussi sur les essais sur le terrain pour valider ou modifier le système.


Montage mécanique axe d'Altitude |


Montage mécanique axe d'Azimut |
Les montages électroniques et mécaniques etant maintenant réalisés, les essais du système vont donc pouvoir commencer. La première des choses à faire est la détermination de la résolution de chaque axe, afin de pouvoir renseigner ces valeurs dans le logiciel de cartographie qui sera utilisé.Pour cela j'ai trouvé une procédure facile à réaliser et me dispensant de tout calcul. En effet j'ai utilisé le logiciel de l'interface Ouranos (compatible avec ma carte électronique) qui comporte une option pour le comptage des pas sur chaque axe. Pour l'axe d'azimut, j'ai fixé un pointeur laser sur le télescope et marqué d'une croix le point rouge projeté sur un mur se trouvant à environ 6m du télescope. J'ai ensuite effectué une rotation de 360° jusqu'à resupperposer le point rouge sur la croix, puis j'ai noté la valeur mesurée par le logiciel.
Pour l'axe d'altitude, j'ai utilisé un niveau à bule (pouvant donner l'horizontale et la verticale) fixé au tube du télescope. Après ajustement de la position horizontale, j'ai effectué une rotation de 90° vérifiée donc grace au niveau à bule, puis j'ai noté la valeur mesurée par le logiciel qu'il faut ici multiplier par 4 (la résolution est toujours exprimée en nombre de pas par tour complet (360°)).Ci-dessous une copie d'écran du logiciel Ouranos.

Les valeurs relevées pour mon télescope sont donc 3208 pas par tour pour l'Azimut et 2148 pas (537 x 4) pour l'Altitude. Pour ce qui est du logiciel qui sera utilisé, aprés plusieurs essais, j'en ai sélectionné 2 qui semblent fonctionner correctement avec l'interface :
- Pour les PC modestes (486 sous Windows95) il y a E.C.U. 2.0 de David J. Lane qui est en fait le logiciel utilisé par le concepteur de l'interface (voir mes liens).
- Pour les PC plus musclés (à partir de Pentium 233 sous Windows98), il est possible d'utiliser Cartes du Ciel 2.75 de Patrick Chevalley.
Mon Dobson étant équipé d'un PC modeste, c'est donc sous ECU que j'effectuerai mes essais, mais tout d'abord réglons les paramètres dans la configuration du logiciel. Ci après les copies d'écran avec mes réglages personnels et notament le protocole de communication MICRO GUIDER III préconisé par le concepteur.



Une fois les paramètres saisis, on peut declencher le fonctionnement du systéme par la commande "Enable Telescope Interface" (même menu déroulant) ou bien le raccourci "Ctrl-Alt-T", ce qui aura pour effet de demander d'abord le calage sur 2 étoiles avant d'aboutir à l'écran final ou un réticule (cercle avec croix) représentera la position du télescope, et se déplacera en suivant les mouvements donnés au télescope. Voici cet écran :

A ce jour je n'ai pas encore eu le temps d'effectuer les essais sur le ciel, le fonctionnement à été testé avec un calage factice juste pour voir si le réticule se déplaçait avec le télescope. J'ai pu constaté que le réticule suit bien le télescope mais semble par moment sauter des pas vennant des encodeurs. Pour l'instant j'attribue ce défaut au calage factice qui ne peut pas correspondre aux coordonées des objets enregistées dans le logiciel. Seul l'essai sur le ciel me permettra je pense de tester l'efficacité et la précision du système avec ce type d'encodeur. Je terminerai donc la rédaction de cette page une fois cet essai réalisé en vous communiquant les résultats obtenus. Donc affaire encore à suivre...
